惯性测量单元(IMU)作为运动捕捉领域的核心器件,能够通过内置的惯性传感器实时感知物体的运动状态,其中线性加速度的精准捕捉是解析足部步态、运动轨迹及动力学特征的关键。足部运动具有高频次、多自由度、姿态变化复杂的特点,IMU需通过传感器选型、数据融合、误差校准等多重技术手段,实现线性加速度的实时、可靠输出。本文将从核心原理、硬件支撑、数据处理及实际应用要点四个维度,系统解析IMU捕捉足部线性加速度的技术路径。
一、核心原理
IMU捕捉线性加速度的核心依赖于内置的微机电系统(MEMS)加速度计,其工作原理基于牛顿第二定律(F=ma),通过感知惯性力作用下敏感元件的位移或应力变化,将机械信号转化为电信号,最终输出与线性加速度成正比的电压或数字信号。针对足部运动场景,这一过程需重点关注加速度计的测量轴与足部运动方向的匹配性——足部在行走、跑跳等动作中,会产生前后(行进方向)、左右(侧向)、上下(垂直方向)三个正交方向的线性加速度,因此IMU需搭载三轴加速度计,实现全维度的加速度感知。
需要明确的是,加速度计输出的原始信号是绝对加速度,包含足部自身的运动加速度与重力加速度的叠加分量。例如,当足部处于静止站立状态时,加速度计会输出沿重力方向(垂直向下)的1g加速度(g为重力加速度,约9.8m/s²);而当足部抬起向前运动时,输出信号则是运动加速度与重力加速度在各测量轴上的矢量合成结果。因此,后续数据处理的核心任务之一便是分离运动加速度与重力分量,得到纯粹的足部运动线性加速度。
二、硬件支撑
足部运动的特殊性对IMU的硬件性能提出了严苛要求,合理的传感器选型与部署方式是确保线性加速度捕捉精度的基础,具体需关注以下要点:
1.加速度计核心参数选型
•测量范围:足部在跑跳等剧烈运动中,线性加速度可达到3-5g,因此需选择测量范围为±8g或±16g的加速度计,避免信号饱和导致数据失真;而在慢走等平缓运动中,±2g的范围虽可满足基础需求,但考虑到运动突变场景,建议优先选择宽量程传感器。
•采样率:足部运动的步态周期通常为0.5-1.5秒,包含 heel strike(脚跟着地)、toe off(脚尖离地)等高频动作环节,其时间分辨率可达10-20ms。为避免信号混叠,IMU的采样率需满足奈奎斯特准则,通常设置为100-1000Hz,其中100-200Hz可满足日常步态分析需求,500-1000Hz则适用于短跑、跳跃等高速运动场景。
•精度与噪声特性:MEMS加速度计的零偏误差(零输入时的输出偏移)和噪声密度直接影响测量精度,足部运动捕捉需选择零偏误差小于10mg、噪声密度低于100μg/√Hz的传感器,以减少静态漂移和动态噪声对线性加速度数据的干扰。
2.IMU的足部部署方案
传感器的安装位置与固定方式直接决定了加速度信号的有效性。针对足部结构,常见的部署方案包括:
•足背部署:将IMU固定于足背中部(足弓与脚趾之间的隆起区域),此处可有效感知足部整体的前后、上下加速度,同时减少脚趾弯曲等局部动作对信号的干扰,是步态分析中最常用的部署位置。
•脚跟部署:通过专用鞋扣或鞋垫将IMU固定于脚跟处,重点捕捉脚跟着地瞬间的冲击加速度(该环节加速度峰值可达2-3g),适用于足部冲击损伤评估场景。
•脚趾部署:将微型IMU固定于脚趾末端,主要感知脚尖离地时的推进加速度,但需注意该位置运动幅度大,易导致传感器松动,需采用柔性固定结构。
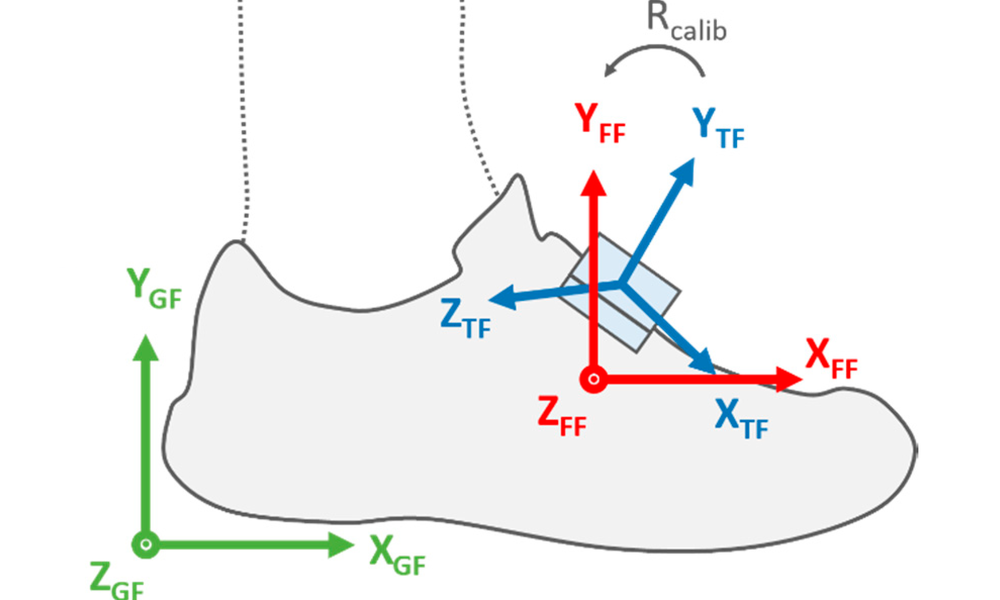
无论何种部署方式,均需确保IMU与足部保持刚性连接,避免运动过程中出现相对滑动,同时需对IMU的坐标系进行校准,使加速度计的测量轴与足部的解剖学方向(前后为X轴、左右为Y轴、上下为Z轴)保持一致,为后续数据解读奠定基础。
三、数据处理
IMU输出的原始加速度信号包含噪声、重力分量及外部干扰,需通过实时数据处理流程提取纯净的足部运动线性加速度,典型处理链路包括以下环节:
1.信号预处理:降噪与滤波
足部运动产生的加速度信号中,高频噪声主要来源于传感器自身的电子噪声和足部与地面的微小振动,低频噪声则多为传感器零偏漂移。针对这一特性,通常采用“高通滤波+低通滤波”的组合方案:
•高通滤波:采用截止频率为0.1-0.5Hz的一阶或二阶巴特沃斯滤波器,滤除零偏漂移等低频噪声,同时保留运动加速度的低频分量(如步态周期内的加速度变化)。
•低通滤波:采用截止频率为10-20Hz的滤波器,滤除高频振动噪声,避免其掩盖真实的运动加速度特征,同时需注意截止频率不可过低,以免丢失脚跟着地等高频动作的加速度峰值信息。
在实时处理场景中,为减少滤波延迟,通常采用IIR(无限脉冲响应)滤波器,其计算效率高,可满足毫秒级的实时输出需求。
2.重力分量分离:基于姿态解算的补偿
分离重力加速度是获取足部运动线性加速度的核心步骤,这一过程需结合IMU内置的陀螺仪数据进行姿态解算,通过确定IMU在三维空间中的姿态角(俯仰角、横滚角、航向角),计算重力加速度在加速度计各测量轴上的投影分量,再从原始信号中减去该分量,得到纯粹的运动加速度。
常用的姿态解算算法包括:
•互补滤波算法:利用陀螺仪短期精度高(可快速响应姿态变化)和加速度计长期稳定性好(可校准陀螺仪漂移)的特点,通过加权融合两者的姿态数据,实现姿态角的实时解算,计算量小,适用于嵌入式IMU的实时处理。
•卡尔曼滤波算法:通过建立系统状态方程和观测方程,对陀螺仪和加速度计的噪声进行统计建模,动态估计姿态角和传感器误差,解算精度更高,但计算复杂度较大,适用于对精度要求较高的场景(如运动康复评估)。
例如,当足部抬起时,IMU的俯仰角发生变化,通过姿态解算得到俯仰角θ后,重力加速度在加速度计X轴(足部前后方向)的投影分量为g·sinθ,Z轴(足部上下方向)的投影分量为g·cosθ,将原始信号减去这两个分量,即可得到足部在前后和上下方向的运动线性加速度。
3.误差校准:提升长期测量精度
足部运动捕捉通常需要长时间连续测量,传感器的温度漂移、安装误差等会导致加速度测量精度下降,因此需进行实时或离线校准:
•零偏校准:在每次运动捕捉开始前,让足部保持静止状态,采集加速度计的原始输出,取平均值作为零偏误差,在后续测量中实时减去该零偏值,补偿传感器的静态偏移。
•温度补偿:MEMS加速度计的零偏和灵敏度会随温度变化,可通过内置温度传感器采集环境温度,建立温度与误差的拟合模型(如线性模型或多项式模型),实时修正加速度测量值。
•安装误差校准:由于IMU与足部的安装无法完全保证坐标系对齐,需通过多点标定的方式(如让足部处于多个已知姿态),计算安装误差矩阵,对加速度信号进行坐标变换,消除安装偏差带来的误差。
四、实际应用要点
在足部运动捕捉的实际应用中(如步态分析、运动康复、智能鞋开发),除了上述技术环节外,还需结合场景特性进行针对性优化:
1.低功耗设计:对于可穿戴IMU(如智能鞋内置传感器),需在采样率与功耗之间寻求平衡,采用间歇采样模式(如运动时提高采样率,静止时降低采样率),延长设备续航时间。
2.抗干扰设计:足部运动过程中易受到地面冲击、电磁干扰(如手机信号)的影响,需在IMU硬件设计中加入缓冲结构(减少冲击对传感器的损伤)和电磁屏蔽层,同时在数据处理中加入异常值检测算法(如3σ准则),剔除冲击或干扰导致的异常加速度数据。
3.多传感器融合:对于高精度需求场景(如专业运动员步态分析),可将IMU与压力传感器(检测足底压力分布)、光学运动捕捉系统结合,通过多源数据融合进一步提升线性加速度的测量精度,同时实现运动学与动力学数据的联动分析。
五、总结
IMU实时捕捉足部运动线性加速度的过程,是“硬件感知-信号处理-姿态解算-误差补偿”的闭环系统。核心依赖于三轴MEMS加速度计的全维度感知能力,通过与陀螺仪的融合实现重力分量分离,再经滤波和校准消除噪声与误差,最终输出与足部运动状态匹配的线性加速度数据。