在自动驾驶、无人机导航、机器人控制、虚拟现实(VR)/增强现实(AR)等众多前沿技术领域,惯性测量单元(Inertial Measurement Unit,简称IMU)扮演着“感知核心”的关键角色。它无需依赖外部信号,就能实时捕捉载体的运动状态,为各类系统提供不可或缺的姿态与运动数据。
一、IMU的核心定义:什么是惯性测量单元?
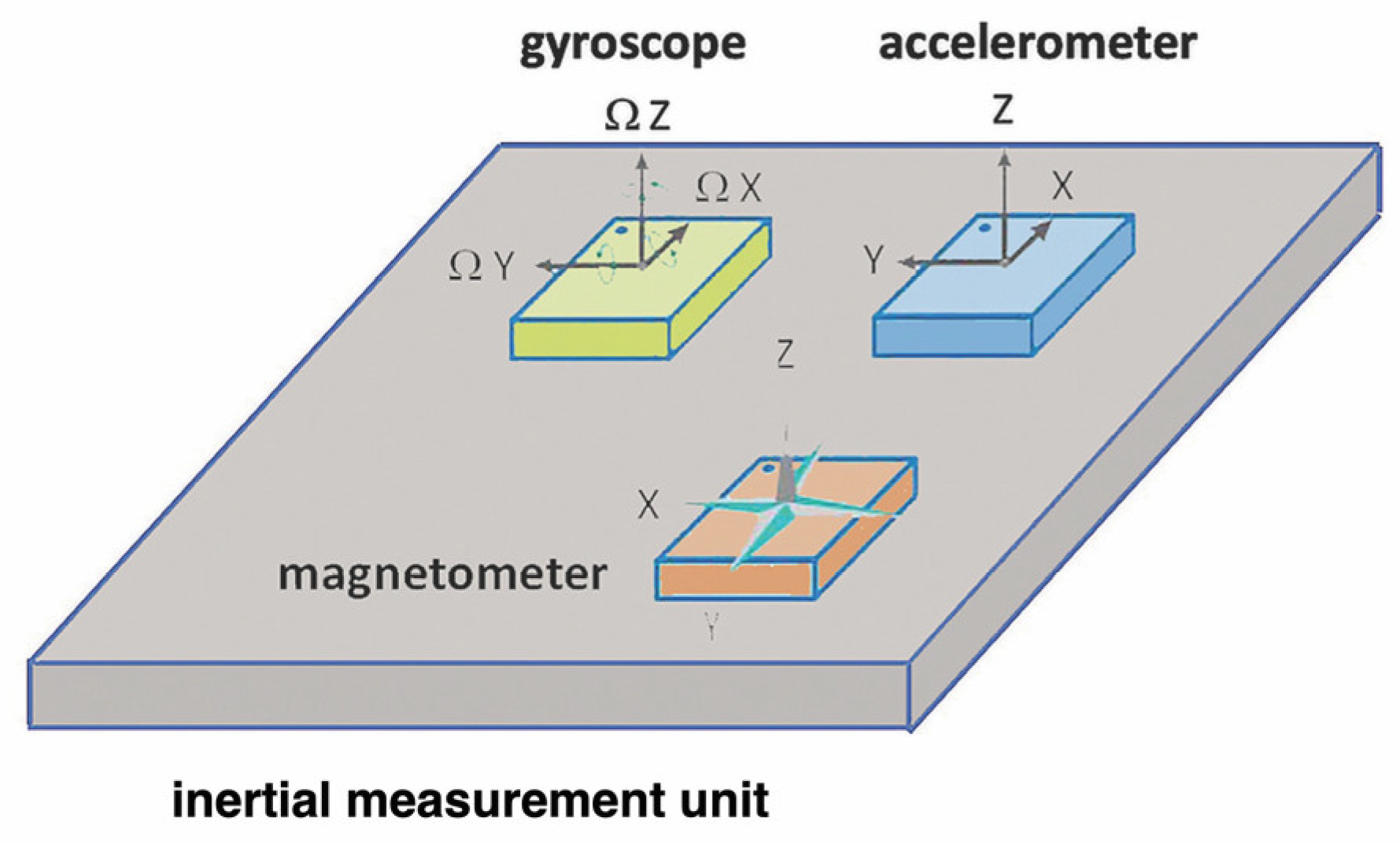
惯性测量单元(IMU)是一种基于惯性原理,通过集成加速度计和陀螺仪(部分高端型号还会集成磁力计),实时测量载体在三维空间内的线加速度、角速率(角速度),并可进一步解算出姿态角(如俯仰角、横滚角、航向角)的传感器组合装置。其核心特性是“自主性”——无需依赖GPS、雷达等外部环境信息,仅通过内部传感器感知自身运动变化,因此在遮挡、干扰等复杂环境下仍能稳定工作,是惯性导航系统(INS)的核心组成部分。
简单来说,IMU的作用相当于载体的“运动神经”:加速度计负责感知“速度变化的快慢”,陀螺仪负责感知“转动的快慢”,两者结合就能完整描述载体的空间运动状态,为后续的导航、控制决策提供基础数据。
二、IMU的核心组成:传感器的“黄金组合”
IMU的性能优劣直接取决于其内部集成的传感器类型与精度。主流IMU通常以“加速度计+陀螺仪”为基础架构,部分面向高精度场景的型号会增加磁力计以修正姿态漂移,形成“三轴加速度计+三轴陀螺仪+三轴磁力计”的九轴配置。
1.核心组件一:三轴加速度计
加速度计的核心功能是测量载体在三维正交坐标系(通常为载体坐标系,即x、y、z轴分别对应载体的前进/后退、左移/右移、上升/下降方向)内的线加速度。其工作原理基于牛顿第二定律(F=ma),通过检测内部敏感元件(如质量块)在加速度作用下产生的惯性力,将力学信号转化为电信号,进而计算出加速度大小。
需要注意的是,加速度计测量的是“绝对加速度”,包括载体的运动加速度和重力加速度的分量。例如,当IMU静止放置时,z轴加速度计会检测到9.8m/s²的重力加速度,这一特性也被用于辅助计算载体的俯仰角和横滚角。
2.核心组件二:三轴陀螺仪
陀螺仪的作用是测量载体绕三维坐标系各轴的角速率(单位通常为°/s或rad/s),即转动的快慢和方向。其工作原理基于角动量守恒定律——高速旋转的陀螺转子会保持其角动量方向不变,当载体发生转动时,转子与载体之间的相对运动将通过传感机构转化为电信号,从而输出角速率数据。
与加速度计不同,陀螺仪测量的是“相对运动”,通过对其输出的角速率进行积分运算,即可得到载体绕各轴的转动角度,进而解算出俯仰角(绕x轴转动)、横滚角(绕y轴转动)和航向角(绕z轴转动)。但陀螺仪存在“漂移”问题,即长时间积分后,微小的测量误差会不断累积,导致姿态角计算出现偏差,因此需要结合其他传感器进行修正。
3.辅助组件:三轴磁力计(可选)
磁力计并非IMU的必需组件,但在需要高精度姿态测量的场景中应用广泛。其核心功能是测量地球磁场的强度和方向,通过将测量到的磁场信号与已知的地球磁场模型对比,可确定载体的绝对航向角(即与地理正北方向的夹角)。
由于陀螺仪的航向角易受漂移影响,而磁力计能提供绝对航向参考,因此“加速度计+陀螺仪+磁力计”的九轴配置可通过数据融合算法(如卡尔曼滤波)互补短板,显著提升姿态测量的长期稳定性和精度。不过,磁力计易受金属物体、电磁干扰等环境因素影响,使用时需进行校准。
三、IMU的工作原理:从信号采集到姿态解算
IMU的工作流程可分为“信号采集—数据预处理—姿态解算”三个核心环节,其本质是通过传感器获取原始数据,再通过算法将数据转化为可直接使用的姿态与运动信息。
1.第一步:原始信号采集
加速度计、陀螺仪(及磁力计)分别在三维坐标系内同步采集数据:加速度计输出各轴的线加速度值(单位:m/s²),陀螺仪输出各轴的角速率值(单位:°/s),磁力计输出各轴的磁场强度值(单位:μT)。这一过程要求传感器具备较高的采样率(通常从几十Hz到几千Hz不等),以确保能捕捉到载体的快速运动变化。
2.第二步:数据预处理
原始传感器数据中通常包含噪声(如电子噪声、机械振动干扰)和系统误差(如零偏、刻度因子误差、安装误差),因此需要进行预处理以提升数据质量。常见的预处理手段包括:
•零偏校准:消除传感器在静止状态下输出的固定偏差(如陀螺仪零漂、加速度计零偏);
•滤波去噪:通过低通滤波、卡尔曼滤波的预测环节等手段,滤除高频噪声;
•误差补偿:根据传感器的校准模型,补偿刻度因子误差(输入与输出的比例偏差)和安装误差(传感器轴与载体轴的不重合偏差)。
3.第三步:姿态解算与数据输出
预处理后的传感器数据将通过姿态解算算法转化为载体的姿态角(俯仰角、横滚角、航向角)和运动参数(速度、位移等)。核心算法包括:
•陀螺仪积分:对陀螺仪输出的角速率进行时间积分,得到载体绕各轴的转动角度,进而得到姿态变化;但长时间积分会导致漂移累积。
•加速度计辅助姿态修正:利用加速度计测量的重力加速度分量,对陀螺仪解算的俯仰角和横滚角进行修正,抑制短期漂移。
•磁力计辅助航向修正:通过磁力计测量的地球磁场方向,对陀螺仪解算的航向角进行修正,解决长期航向漂移问题。
•数据融合算法:核心为卡尔曼滤波及其衍生算法(如扩展卡尔曼滤波EKF、无迹卡尔曼滤波UKF),通过融合多传感器数据,在噪声抑制和误差修正之间找到平衡,输出稳定、高精度的姿态与运动信息。
最终,IMU通常以数字信号(如通过SPI、I2C、UART等接口)输出经过解算的姿态角、加速度、角速率等数据,供上层系统(如自动驾驶的决策模块、无人机的飞控系统)使用。
四、IMU的关键性能指标:决定精度的核心参数
IMU的性能指标直接决定了其适用场景,不同领域对指标的要求差异极大(如消费级VR设备与军用导弹导航的IMU精度要求相差上万倍)。核心性能指标主要包括以下几类:
1.陀螺仪关键指标
•零偏稳定性(Bias Stability):衡量陀螺仪在静止状态下输出偏差的长期稳定性,单位通常为°/h(度/小时)。这是陀螺仪最重要的指标,直接决定姿态解算的长期精度——零偏稳定性越低,漂移越慢,精度越高。消费级IMU的零偏稳定性通常在100°/h以上,工业级约为10-50°/h,而军用级可达到0.001°/h以下。
•角随机游走(Angular Random Walk, ARW):衡量陀螺仪输出的短期噪声特性,单位为°/√h。反映了陀螺仪在短时间内的随机误差,对快速姿态变化的测量精度有重要影响。
•量程(Full Scale Range):陀螺仪能准确测量的最大角速率,单位为°/s。需根据载体的运动特性选择——如无人机的量程通常为±2000°/s,而高精度云台的量程可低至±500°/s。
2.加速度计关键指标
•零偏稳定性(Bias Stability):与陀螺仪类似,指加速度计在静止时输出的固定偏差,单位通常为μg(1μg=10⁻⁶g,g为重力加速度)。消费级约为100-1000μg,工业级约为10-100μg,军用级可达到0.1μg以下。
•速度随机游走(Velocity Random Walk, VRW):衡量加速度计的短期噪声,单位为m/s/√h,影响速度和位移计算的短期精度。
•量程:加速度计能准确测量的最大加速度,单位为g。消费级设备通常为±2-8g,工业级为±16g,而用于剧烈运动场景(如赛车)的IMU量程可达到±40g以上。
3.系统级关键指标
•采样率(Sampling Rate):IMU每秒采集数据的次数,单位为Hz。采样率越高,越能捕捉快速运动,但同时会增加数据量和处理压力。消费级IMU采样率通常为100-1000Hz,工业级可达到2000Hz以上。
•姿态更新率:IMU输出解算后姿态数据的频率,单位为Hz,通常与采样率匹配或略低,直接影响上层系统的响应速度。
•温度稳定性:传感器性能随温度变化的程度。温度变化会导致零偏、刻度因子等参数漂移,因此高精度IMU通常内置温度补偿模块,确保在宽温度范围内(如-40℃~85℃)的稳定性。
五、IMU的分类:按精度与技术原理划分
根据核心传感器的技术原理和精度水平,IMU可分为多个类别,分别对应不同的应用场景。
1.按技术原理划分
•微机电系统(MEMS)IMU:当前应用最广泛的IMU类型,核心传感器基于MEMS技术制造,具有体积小、重量轻、成本低、功耗低的特点。其加速度计通过电容式、压阻式等原理检测质量块的位移,陀螺仪通过振动结构的科里奥利力实现角速率测量。MEMS IMU的精度覆盖范围广,从消费级(如手机、VR设备)到工业级(如无人机、机器人)均有应用,但精度上限低于光学陀螺IMU。
•光纤陀螺(FOG)IMU:基于萨格纳克效应,通过检测两束反向传播的激光在光纤环中的光程差来测量角速率。光纤陀螺具有精度高、寿命长、抗干扰能力强的特点,零偏稳定性可达到0.01-0.001°/h,主要应用于工业级高精度导航(如船舶、卫星)和军用领域。但体积和成本相对MEMS IMU更高。
•激光陀螺(RLG)IMU:通过环形激光器中两束反向激光的频率差测量角速率,精度极高(零偏稳定性可低于0.0001°/h),是目前惯性导航领域的“精度标杆”。主要用于军用(如导弹、战斗机)、航空航天(如航天器姿态控制)等对精度要求极高的场景,但结构复杂、成本昂贵,且存在“闭锁效应”,需通过机械抖动等方式补偿。
•半球谐振陀螺(HRG)IMU:基于半球形谐振子的振动模式变化测量角速率,具有超高可靠性、长寿命、抗恶劣环境的特点,精度接近激光陀螺,且无转动部件,维护成本低。主要应用于深空探测、战略武器等极端场景。
2.按精度水平划分
•消费级IMU:精度最低,陀螺仪零偏稳定性通常在100-1000°/h,加速度计零偏稳定性在100-1000μg。主要用于手机(如屏幕旋转、步数统计)、VR/AR设备(如头部姿态跟踪)、智能手表等消费电子产品,成本仅几美元到几十美元。
•工业级IMU:精度中等,陀螺仪零偏稳定性10-50°/h,加速度计零偏稳定性10-100μg。应用于无人机飞控、机器人导航、车载辅助驾驶、工业设备姿态监测等场景,成本从几百美元到几千美元不等。
•军用/航空航天级IMU:精度最高,陀螺仪零偏稳定性低于1°/h,部分可达0.001°/h以下。用于导弹制导、战斗机导航、船舶惯性导航、航天器姿态控制等关键领域,成本高达数万美元甚至数十万美元,且通常涉及技术封锁。
六、IMU的典型应用场景:从消费电子到国防军工
IMU的自主性和实时性使其在众多领域不可或缺,不同精度的IMU对应不同的应用需求,形成了从消费电子到国防军工的完整应用链条。
1.消费电子领域
消费级MEMS IMU是该领域的核心,凭借低成本、小体积的优势广泛应用:
•智能手机与智能穿戴:实现屏幕自动旋转(通过姿态角检测)、步数统计(通过加速度计检测振动)、导航辅助(在GPS信号弱时,通过IMU推算位置)、健康监测(如心率变异性辅助、跌倒检测)。
•VR/AR设备:实时跟踪用户的头部姿态、手部动作,实现虚拟场景与用户动作的同步,提升沉浸式体验。例如VR头盔中的IMU可在10ms内完成姿态更新,确保画面无延迟。
•游戏手柄与运动相机:游戏手柄通过IMU实现体感操作(如挥舞手柄模拟击球);运动相机(如GoPro)通过IMU实现画面防抖,抵消拍摄过程中的抖动。
2.工业与民用领域
工业级IMU(MEMS或光纤陀螺)主要用于运动控制和导航定位,要求较高的稳定性和可靠性:
•无人机与无人车:无人机的飞控系统依赖IMU实时获取姿态(如悬停时的平衡控制)和运动状态(如加速、转向),在GPS中断时(如室内、峡谷),通过IMU实现“无GPS导航”;无人车则通过IMU与GPS、激光雷达的融合,提升复杂路况下的定位精度。
•机器人与自动化设备:工业机器人(如机械臂)通过IMU检测末端执行器的姿态,确保精准抓取和装配;服务机器人通过IMU实现自主避障和路径规划,适应家庭、商场等复杂环境。
•船舶与轨道交通:船舶导航中,IMU与GPS融合形成组合导航系统,在远洋航行中应对GPS信号丢失的情况;轨道交通领域,IMU用于列车定位和姿态监测,辅助实现自动驾驶。
•测绘与地质勘探:在无人机测绘、地震监测中,IMU用于记录设备的姿态和运动轨迹,确保测绘数据的准确性;地质勘探设备通过IMU检测振动加速度,辅助识别地下地质结构。
3.国防与航空航天领域
该领域对IMU的精度和可靠性要求极高,通常采用光纤陀螺、激光陀螺或半球谐振陀螺IMU:
•军用装备:导弹制导系统依赖IMU实现“发射后不管”,在无外部信号(如被电子干扰)的情况下,通过IMU精确推算飞行轨迹,命中目标;战斗机、坦克的导航系统通过IMU提供实时姿态和位置信息,确保在复杂战场环境下的机动性。
•航空航天:航天器(如卫星、空间站)通过IMU监测姿态,实现轨道调整和稳定控制;运载火箭在发射过程中,IMU实时提供加速度和角速率数据,用于修正飞行轨迹,确保精准入轨。
•特种作战:特种部队的单兵导航设备(如战术头盔)集成IMU,在丛林、地下等GPS屏蔽环境下,为士兵提供位置和姿态参考,确保战术行动的隐蔽性和准确性。
七、IMU的发展趋势:高精度、小型化与多传感器融合
随着下游应用需求的升级,IMU正朝着“更高精度、更小体积、更低功耗、更强融合能力”的方向发展,同时技术创新不断突破性能瓶颈。
•MEMS IMU精度提升:通过新型MEMS结构设计(如双质量块、谐振式)、先进封装技术(如真空封装减少空气阻尼)和校准算法(如自适应卡尔曼滤波),消费级MEMS IMU的精度正逐步接近工业级,而工业级MEMS IMU的零偏稳定性已突破1°/h,有望部分替代中低端光纤陀螺。
•光纤陀螺小型化与低成本化:通过光纤环小型化(如微光纤环)、集成光学器件等技术,光纤陀螺IMU的体积和成本大幅降低,正从军用向高端工业领域普及(如船舶导航、无人机高精度导航)。
•多传感器融合深化:IMU与GPS、北斗、激光雷达(LiDAR)、视觉传感器(摄像头)的融合成为主流趋势。例如在自动驾驶中,IMU的高采样率可弥补GPS的更新延迟,激光雷达的环境感知能力可修正IMU的漂移,形成“优势互补”的定位系统。
•极端环境适应性增强:针对高温、高压、强振动、强电磁干扰等极端场景(如深空探测、井下勘探),IMU通过材料创新(如耐高温陶瓷封装)和结构优化,提升可靠性和稳定性,满足特殊领域的应用需求。
八、总结
惯性测量单元(IMU)作为一种核心的运动感知设备,以“加速度计+陀螺仪”为核心架构,通过惯性原理实现载体运动状态的自主测量。其性能覆盖从消费级到军用级的全范围,应用场景渗透到消费电子、工业控制、国防军工等众多领域,成为现代智能系统不可或缺的“感知中枢”。