在航空、航海、无人机、机器人等众多需要精准定位与姿态控制的领域,姿态与航向参考系统(Attitude and Heading Reference System,简称AHRS)扮演着至关重要的角色。它作为一种核心的惯性测量设备,能够实时输出载体的姿态角(俯仰角、横滚角)和航向角,为载体的导航、控制和决策提供关键数据支撑。本文将从定义、核心功能、工作原理、关键组成、应用场景及技术发展趋势等方面,对AHRS进行全面深入的解析。
一、AHRS的基本定义与核心功能
1.基本定义
AHRS是一种基于惯性原理和传感器融合技术的系统,它无需依赖外部参考信号(如GPS)即可在短时间内独立输出载体的姿态和航向信息。与传统的惯性导航系统(INS)相比,AHRS结构更简洁、成本更低,虽然在长时间精度上略逊一筹,但能满足大多数中低精度需求的应用场景,是INS技术在民用和工业领域的重要简化与应用延伸。
2.核心功能
AHRS的核心功能是实时、准确地获取载体的空间姿态与航向信息,具体可拆解为三个关键参数的测量与输出:
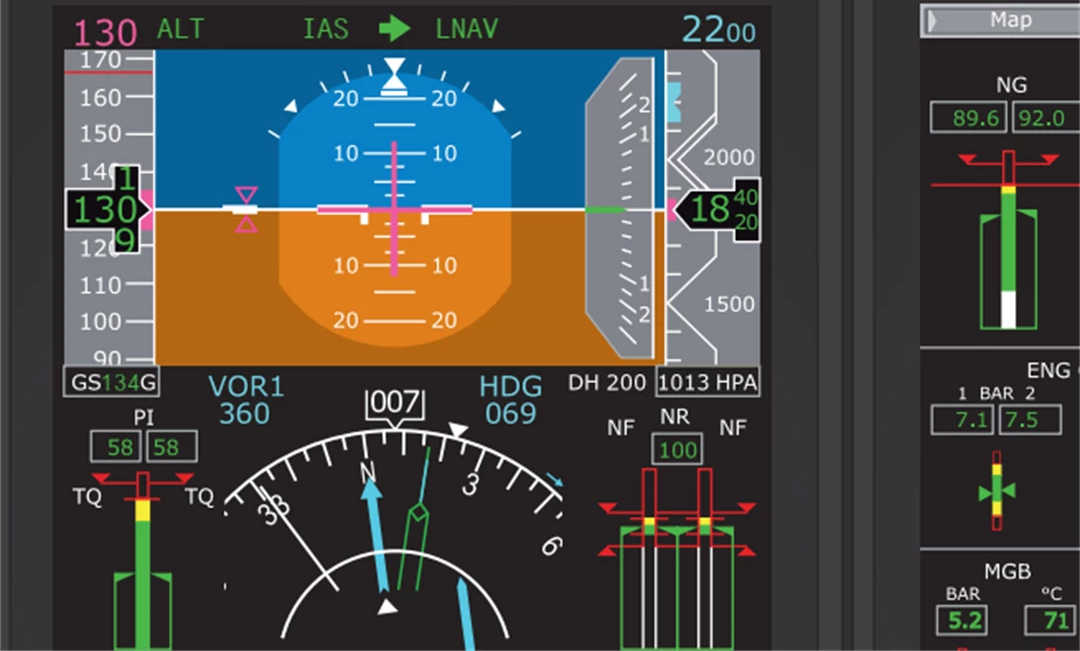
•俯仰角(Pitch):载体绕横向轴(垂直于机身前进方向)的旋转角度,反映载体的上下倾斜状态,如飞机抬头或低头的角度。
•横滚角(Roll):载体绕纵向轴(平行于机身前进方向)的旋转角度,体现载体的左右倾斜状态,如飞机倾斜转弯时的角度。
•航向角(Heading):载体纵向轴与地球真北或磁北方向的夹角,用于确定载体的行驶或飞行方向,是导航中“向哪里去”的核心参数。
此外,部分高性能AHRS还会同步输出载体的角速率、线加速度等原始数据,为后续的控制算法提供更丰富的输入信息。
二、AHRS的工作原理与技术核心
1.工作原理框架
AHRS的工作原理基于“惯性测量+传感器融合”的双重逻辑。首先,通过惯性传感器采集载体的运动原始数据;然后,利用融合算法对多源数据进行校准和优化,最终输出稳定、准确的姿态与航向信息。其核心逻辑是通过惯性测量捕捉载体的瞬时运动变化,同时借助辅助传感器修正惯性测量的累积误差,实现“短期高精度+长期稳定性”的平衡。
2.关键技术:传感器融合算法
传感器融合是AHRS的技术核心,其目的是解决单一传感器的局限性。由于惯性传感器(如陀螺仪)存在漂移误差,长时间单独使用会导致姿态数据严重偏离实际;而磁传感器易受电磁干扰,加速度计易受载体动态加速度影响。因此,AHRS必须通过融合算法将多传感器数据进行互补校准。
目前主流的融合算法包括:
•卡尔曼滤波(Kalman Filter):适用于线性系统,通过预测-更新的迭代过程,对传感器噪声进行有效抑制,是AHRS中应用最广泛的基础算法。
•扩展卡尔曼滤波(EKF):针对AHRS姿态解算中的非线性问题(如姿态角与传感器数据的非线性关系),通过泰勒展开将非线性系统线性化,拓展了卡尔曼滤波的应用场景。
•无迹卡尔曼滤波(UKF):通过无迹变换处理非线性问题,避免了EKF线性化带来的误差,在高精度AHRS中应用日益广泛。
•互补滤波(Complementary Filter):结构简单、计算量小,通过高低通滤波器分别提取不同传感器的有效信息(如陀螺仪的高频姿态变化、加速度计的低频姿态基准),适用于对实时性要求高、算力有限的场景(如小型无人机)。
三、AHRS的关键组成部分
AHRS的硬件系统主要由惯性传感器模块、辅助传感器模块、数据处理单元和通信接口四部分组成,各部分协同工作实现数据的采集、处理与输出。
1.惯性传感器模块(核心感知单元)
惯性传感器是AHRS获取载体运动数据的核心,主要包括陀螺仪和加速度计,二者通常集成在MEMS(微机电系统)芯片中,实现小型化和低成本。
•陀螺仪(Gyroscope):测量载体的角速率,是姿态解算的直接依据。通过积分角速率可得到姿态角的变化量,但存在零偏漂移(即无运动时输出非零值),需通过融合算法修正。MEMS陀螺仪凭借体积小、成本低的优势,成为民用AHRS的主流选择;而光纤陀螺仪、激光陀螺仪则因精度高,应用于航空航天等高端领域。
•加速度计(Accelerometer):测量载体的比力(即惯性力与重力的合力)。在载体静止或匀速运动时,加速度计的输出可反映重力方向,从而为俯仰角和横滚角提供基准;但在载体加速运动时,会受到动态加速度干扰,需与陀螺仪数据融合使用。
2.辅助传感器模块(误差修正单元)
辅助传感器用于修正惯性传感器的累积误差,核心是磁传感器,部分高端AHRS还会集成GPS模块。
•磁传感器(Magnetometer):测量地球磁场强度,通过地球磁场的方向为航向角提供绝对基准,解决陀螺仪航向角漂移的问题。但磁传感器易受载体本身的金属结构、电子设备电磁干扰,需进行磁校准(如硬磁校准、软磁校准)。
•GPS模块(可选):部分AHRS集成GPS模块,通过GPS获取的速度、位置信息辅助修正姿态误差,尤其在长时间运动场景下,可进一步提升航向和姿态的稳定性。这类集成GPS的系统也被称为GNSS-AHRS。
3.数据处理单元与通信接口
数据处理单元是AHRS的“大脑”,通常由MCU(微控制单元)或DSP(数字信号处理器)组成,负责运行传感器融合算法、处理原始数据并输出姿态与航向信息。通信接口则用于实现AHRS与外部设备(如控制器、显控终端)的数据交互,常见接口包括UART、CAN、SPI、Ethernet等,可根据应用场景选择不同的通信速率和协议。
四、AHRS的主要应用场景
凭借“无外部依赖、实时输出、小型化”的优势,AHRS已广泛应用于航空、航海、地面交通、机器人、工业控制等多个领域,成为载体姿态与航向测量的核心设备。
1.航空领域
在通用航空、无人机、直升机等场景中,AHRS是关键的导航与控制设备。例如,小型通用飞机使用AHRS替代传统的机械陀螺仪,降低设备成本和重量;无人机通过AHRS实时获取姿态信息,实现稳定悬停、航线飞行、自动避障等功能;直升机在低空飞行时,AHRS提供的姿态和航向数据可辅助飞行员完成复杂机动。
2.航海领域
在船舶导航中,AHRS可替代传统的磁罗经和陀螺罗经,为船舶提供稳定的航向和姿态信息,尤其在GPS信号受遮挡的狭窄水域(如海峡、港口),AHRS的无外部依赖特性可确保导航不中断。同时,AHRS数据还可用于船舶的姿态控制(如减摇系统)和航海仪器的校准。
3.地面交通与机器人领域
在自动驾驶汽车中,AHRS用于获取车辆的姿态(如倾斜角)和行驶方向,辅助激光雷达、摄像头等传感器完成环境感知和路径规划;在AGV(自动导引车)中,AHRS确保车辆在仓储、工厂等场景中精准定位和行驶;在服务机器人、工业机器人中,AHRS帮助机器人实现平稳运动和姿态调整,提升作业精度。
4.其他领域
AHRS还在虚拟现实(VR)/增强现实(AR)、运动捕捉、地质勘探等领域有重要应用。例如,VR/AR设备通过AHRS实时捕捉用户头部的姿态变化,实现虚拟场景的同步切换;运动捕捉系统利用AHRS获取运动员的动作姿态数据,用于体育训练分析;地质勘探设备中的AHRS可校正勘探仪器的姿态,确保勘探数据的准确性。
五、AHRS的技术发展趋势
随着MEMS技术、传感器融合算法和芯片算力的不断提升,AHRS正朝着“高精度、小型化、低功耗、低成本”的方向发展,同时呈现出与其他技术深度融合的趋势。
•精度持续提升:一方面,MEMS传感器的制造工艺不断进步,零偏漂移、噪声等指标持续优化;另一方面,融合算法的升级(如基于深度学习的自适应融合算法)进一步提升了数据处理精度,使民用AHRS的性能逐渐接近传统中低端INS。
•小型化与集成化:MEMS技术的发展使AHRS的体积不断缩小,目前已出现芯片级AHRS产品;同时,AHRS正与GPS、激光雷达、摄像头等设备深度集成,形成一体化的导航感知系统,满足复杂场景的需求。
•低功耗与长续航:针对无人机、可穿戴设备等移动场景,AHRS通过低功耗芯片设计和算法优化,大幅降低功耗,延长设备续航时间。
•抗干扰能力增强:通过新型磁校准算法、电磁屏蔽设计等技术,AHRS的抗电磁干扰能力不断提升,适应复杂的工业环境和电磁环境。
六、总结
姿态与航向参考系统(AHRS)作为一种基于惯性原理和传感器融合技术的核心设备,通过实时输出载体的俯仰角、横滚角和航向角,为各领域的导航、控制提供了关键数据支撑。其核心优势在于“无外部依赖的短期高精度”,通过陀螺仪、加速度计、磁传感器的协同工作和融合算法的优化,有效平衡了精度与稳定性。
从应用场景来看,AHRS已渗透到航空、航海、无人机、自动驾驶、机器人等多个领域,成为现代智能化设备不可或缺的组成部分。未来,随着传感器技术、算法和芯片算力的持续进步,AHRS的性能将进一步提升,应用场景也将不断拓展,为更多智能化场景提供更可靠的姿态与航向解决方案。