在数据采集与信号处理领域,噪声干扰是影响数据质量的核心问题之一。滑动窗口滤波算法(Sliding Window Filter Algorithm)作为一种简单高效的时域滤波方法,凭借低计算复杂度、实时性强的优势,被广泛应用于传感器数据平滑、工业数据预处理、通信信号去噪等场景。本文将从算法原理、数学表达、实现步骤、优缺点及典型应用五个维度,全面解析滑动窗口滤波算法。
一、算法核心原理
“窗口滑动” 与 “数据平滑” 的结合。
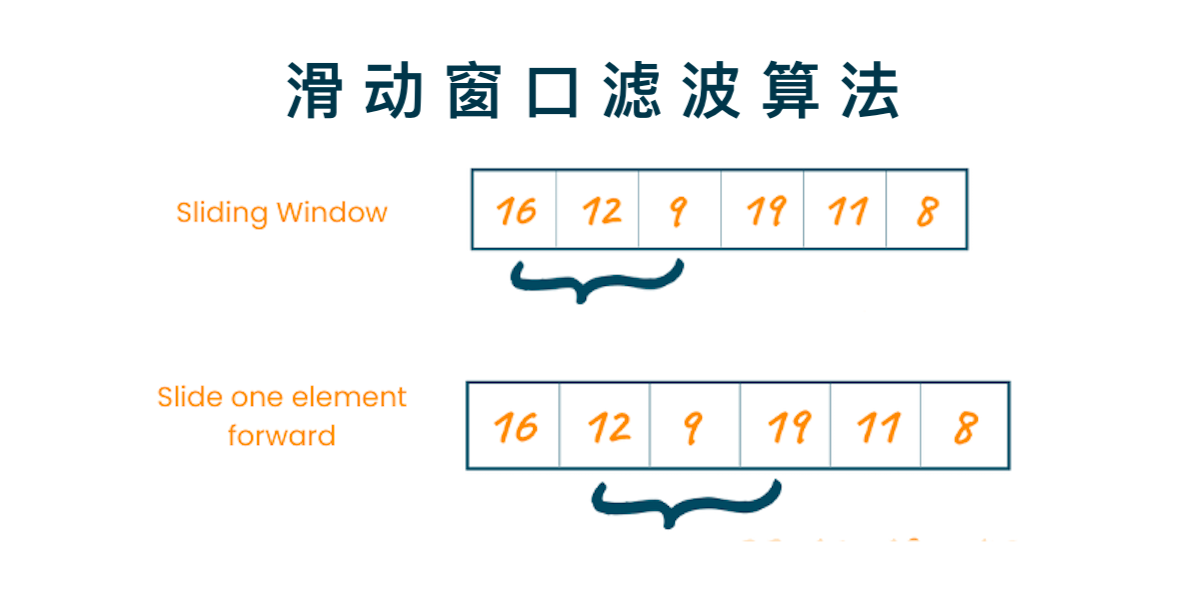
滑动窗口滤波的核心思想可概括为 “固定窗口、动态滑动、局部平均”:
窗口定义:设定一个长度为 N 的 “数据窗口”(N 为正整数,需根据噪声特性与数据采样频率确定),窗口内包含连续采集的 N 个原始数据点;
滑动规则:当新数据采集完成后,窗口整体向 “新数据方向” 移动 1 个单位 —— 丢弃窗口中最早的 1 个数据,纳入最新采集的 1 个数据,保持窗口长度 N 不变;
平滑处理:对当前窗口内的 N 个数据进行 “局部统计运算”(最常用为算术平均,也可扩展为加权平均、中值等),运算结果作为 “滤波后的数据” 输出,实现对原始数据中随机噪声的抑制。
这种 “局部窗口” 机制的优势在于:无需存储全部历史数据,仅需维护窗口内的 N 个数据,极大降低了内存占用与计算复杂度,特别适合实时数据处理场景。
二、数学表达
滑动窗口滤波的数学模型需结合 “窗口滑动” 的时序特性定义。假设:
原始数据序列为 x₀, x₁, x₂, ..., xₖ, ...(xₖ表示第 k 时刻采集的原始数据);
窗口长度为 N(即每个窗口包含 N 个连续数据点,N≥2,具体值需根据实际场景调试);
滤波后的数据序列为 y₀, y₁, y₂, ..., yₖ, ...(yₖ表示第 k 时刻的滤波输出)。
当窗口滑动至第 k 时刻时,窗口内包含的数据为 xₖ₋ₙ₊₁, xₖ₋ₙ₊₂, ..., xₖ(若 k
以最常用的算术平均型滑动窗口滤波为例,第 k 时刻的滤波输出 yₖ的计算公式为:
yₖ = (1/N) × Σ(从 i=k-N+1 到 i=k)xᵢ
其中:
Σ(从 i=a 到 i=b)f (i) 表示对函数 f (i) 从 i=a 到 i=b 的所有值求和;
(1/N) 为平均系数,确保滤波输出的幅值与原始数据一致(避免幅值衰减)。
若扩展为加权平均型滑动窗口滤波(对窗口内不同位置的数据赋予不同权重,如 “近期数据权重更高”),公式可调整为:
yₖ = Σ(从 i=k-N+1 到 i=k)(wᵢ × xᵢ) / Σ(从 i=k-N+1 到 i=k)wᵢ
其中 wᵢ 为第 i 个数据的权重(wᵢ > 0,通常窗口内 “越新的数据 wᵢ越大”,以提升对最新数据的响应速度),分母为权重总和,用于归一化处理,避免输出幅值失真。
三、算法实现步骤:从初始化到实时滤波
滑动窗口滤波的实现流程简洁清晰,可分为 “初始化”“数据更新”“滤波计算”“输出” 四个核心步骤,以下以嵌入式系统或实时数据处理场景为例,说明具体实现逻辑(伪代码辅助理解):
步骤 1:初始化参数与数据缓存
确定窗口长度 N(如 N=5,需根据噪声强度调试:噪声越强,N 可适当增大;但 N 过大会导致响应延迟增加);
创建一个长度为 N 的 “数据缓存数组” buf[0...N-1],用于存储当前窗口内的数据;
初始化 “数据计数变量” count = 0(记录已存入缓存的数据个数,用于判断是否进入稳定滤波阶段);
初始化 “滤波输出变量” y = 0。
步骤 2:实时接收新数据并更新窗口
当采集到新的原始数据 x_new 时:
若 count < N(初始阶段,窗口未填满):
将 x_new 存入 buf [count],count = count + 1;
若 count = N(稳定阶段,窗口已满):
丢弃 buf [0](最早的数据),将 buf [1...N-1] 依次向前移动 1 位(即 buf [i] = buf [i+1],i 从 0 到 N-2),再将 x_new 存入 buf [N-1](最新数据)。
步骤 3:计算滤波输出
若 count < N(初始阶段,数据不足):
采用 “局部平均”,即 y = (buf [0] + buf [1] + ...+ buf [count-1]) /count;
若 count = N(稳定阶段):
按算术平均公式计算,即 y = (buf [0] + buf [1] + ...+ buf [N-1]) / N;
(若为加权平均,则计算 y = (w0×buf [0] + w1×buf [1] + ...+ wN-1×buf [N-1]) / (w0 + w1 + ...+ wN-1))。
步骤 4:输出滤波结果
将计算得到的 y 作为当前时刻的滤波输出,用于后续的数据处理(如显示、控制、分析等),同时返回步骤 2,等待下一个新数据,实现 “实时滑动滤波”。
伪代码示例(算术平均型):
// 初始化
int N = 5; // 窗口长度
float buf[N] = {0}; // 数据缓存数组
int count = 0; // 数据计数
float y = 0; // 滤波输出
// 实时滤波函数(输入:新原始数据x_new,输出:滤波结果y)
float slidingWindowFilter(float x_new) {
// 步骤2:更新窗口数据
if (count < N) {
buf[count] = x_new;
count++;
} else {
// 窗口滑动:丢弃最早数据,存入新数据
for (int i = 0; i < N-1; i++) {
buf[i] = buf[i+1];
}
buf[N-1] = x_new;
}
// 步骤3:计算滤波输出
float sum = 0;
for (int i = 0; i < count; i++) {
sum += buf[i];
}
y = sum / count;
// 步骤4:输出结果
return y;
}
四、算法优缺点分析
滑动窗口滤波的优势与局限性均与其 “局部窗口” 特性密切相关,在实际应用中需根据需求权衡选择:
1.核心优点
计算复杂度低:仅需对窗口内的 N 个数据进行求和(或加权求和)与除法运算,时间复杂度为 O (N),且 N 通常较小(如 3~20),适合嵌入式系统、实时传感器等算力有限的场景;
内存占用小:仅需存储窗口内的 N 个数据,无需缓存全部历史数据,尤其适合长时间连续数据采集场景;
实现难度低:数学模型简单,代码逻辑清晰,无需复杂的参数调试(仅需确定窗口长度 N),开发效率高;
对随机噪声抑制效果好:对于高斯噪声、椒盐噪声等随机干扰,通过局部平均可有效降低噪声波动,使数据曲线更平滑。
2.主要局限性
响应延迟:窗口长度 N 越大,滤波平滑效果越好,但对 “数据突变” 的响应越慢(如原始数据突然上升 / 下降时,滤波输出需等待 N 个数据更新后才能跟上变化),可能导致 “滞后误差”;
对周期性噪声抑制弱:若噪声具有固定周期(如 50Hz 工频干扰),且窗口长度 N 与噪声周期不匹配,滤波效果会显著下降,甚至可能保留部分周期性噪声;
幅值失真风险:当原始数据包含 “尖锐峰值”(如脉冲信号)时,算术平均会将峰值 “拉平”,导致信号幅值失真(此时可改用 “中值滑动窗口滤波”,通过取窗口内数据的中值,更好地保留峰值特性)。
五、典型应用场景
滑动窗口滤波因 “简单、高效、实时” 的特点,在多个领域均有广泛应用,以下为常见场景示例:
1.传感器数据平滑
应用场景:温度传感器、湿度传感器、压力传感器等采集的数据通常包含随机噪声(如环境干扰、电路噪声),需平滑后用于显示或控制;
实践案例:智能家居中的室温监测 —— 采用 N=3 的滑动窗口滤波,对每秒采集的温度数据进行平均,既抑制了噪声导致的 “温度跳动”,又保证了温度变化的实时性(响应延迟仅 2 秒)。
2.工业数据预处理
应用场景:工业生产中的流水线转速、液位、流量等数据,需实时滤波后用于 PLC(可编程逻辑控制器)控制,避免噪声导致的误触发;
实践案例:化工储罐液位监测 —— 采用 N=5 的加权滑动窗口滤波(窗口内最新 2 个数据权重为 0.3,其余 3 个为 0.1),既平滑了泵体振动导致的液位波动,又提升了对 “液位突然下降”(如泄漏)的响应速度。
3.通信信号去噪
应用场景:无线通信(如蓝牙、LoRa)接收的信号中包含信道噪声,需滤波后提取有效数据;
实践案例:物联网(IoT)设备的无线数据接收 —— 采用 N=4 的算术平均滑动窗口滤波,对接收的信号强度(RSSI)数据进行平滑,减少噪声导致的 “信号断连” 误判。
4.生物信号处理
应用场景:心电图(ECG)、脉搏波等生物信号易受呼吸、肌肉震颤等干扰,需滤波后分析;
实践案例:便携式心率监测设备 —— 采用 N=6 的中值滑动窗口滤波,对采集的脉搏数据进行处理,既抑制了噪声,又避免了算术平均对脉搏峰值的 “平滑失真”,确保心率计算准确。
六、算法优化与扩展:应对复杂场景
为解决滑动窗口滤波的局限性(如响应延迟、周期性噪声抑制弱),可通过以下优化方向扩展算法能力:
1.变窗口长度策略
原理:根据原始数据的 “波动程度” 动态调整窗口长度 N—— 当数据波动大(噪声强)时,增大 N 以提升平滑效果;当数据波动小(噪声弱)时,减小 N 以降低响应延迟;
实现:设定波动阈值(如数据标准差 σ),若 σ > 阈值,则 N = N_max;若 σ < 阈值,则 N = N_min(N_min < N < N_max)。
2.加权平均与自适应权重
原理:对窗口内不同位置的数据赋予 “自适应权重”—— 例如,基于数据的 “可信度”(如传感器精度、信号强度)调整权重:可信度高的数据权重更大,可信度低的数据权重更小;
应用:多传感器数据融合场景,如无人机的多轴陀螺仪数据滤波,对精度高的陀螺仪数据赋予更高权重,提升滤波结果可靠性。
3.结合其他滤波算法
组合滤波:将滑动窗口滤波与其他滤波算法(如卡尔曼滤波、指数平滑滤波)结合,互补优势 —— 例如,先用滑动窗口滤波抑制高频随机噪声,再用卡尔曼滤波预测数据趋势,降低滞后误差;
示例:自动驾驶中的毫米波雷达数据处理 —— 滑动窗口滤波去除雷达信号的高频噪声,卡尔曼滤波基于车辆运动模型预测目标位置,提升目标跟踪的准确性与实时性。
4.频域辅助设计
原理:通过傅里叶变换分析原始数据的噪声频率,设计 “频率匹配” 的窗口长度 N—— 例如,若周期性噪声的频率为 f,则设定窗口长度 N = F_s /f(F_s 为数据采样频率),使窗口长度与噪声周期一致,通过平均抵消周期性噪声;
应用:工业电力设备的电流、电压数据处理,针对 50Hz 工频干扰,设定 N = F_s / 50,有效抑制周期性干扰。
七、总结
滑动窗口滤波算法是一种 “轻量级” 时域滤波方法,其核心优势在于低计算复杂度、低内存占用、易实现,特别适合实时数据处理与算力有限的场景(如嵌入式系统、物联网设备)。通过合理选择窗口长度 N、灵活选用算术平均 / 中值 / 加权平均等运算方式,可有效抑制随机噪声,提升数据质量。
在实际应用中,需根据数据特性(噪声类型、采样频率、突变频率)与业务需求(实时性、精度、幅值保留)权衡算法参数,并可通过 “变窗口长度”“自适应权重”“组合滤波” 等优化策略,应对复杂场景的挑战。无论是传感器数据平滑、工业控制,还是生物信号处理,滑动窗口滤波均以其 “简单高效” 的特性,成为数据预处理领域的经典算法之一。